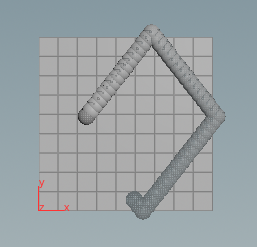
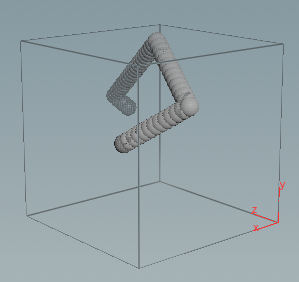
ふと、平井氏のTweetに誘発されて作ってみた。
ダイナミクスを使わず、キーフレームによる移動をもとに、正しくボールを転がすソルバです。
思いの外サクッとできたのでちょっと嬉しい。
Houdiniでフリー回転ソルバを作ってみた
2

ふと、平井氏のTweetに誘発されて作ってみた。
ダイナミクスを使わず、キーフレームによる移動をもとに、正しくボールを転がすソルバです。
思いの外サクッとできたのでちょっと嬉しい。
長い間、仕事ではパイプライン系ツールを書くことが多くなり、幾何学や物理などの数学とはだいぶ疎遠になってしまいました。
最近になって、やっとHoudiniを業務で使用させてもらえる環境が与えられたこともあり、これも良い機会ということで、これからしばらくの間、数学の勉強や復習とリハビリを兼ね、Processingの名著 [NATURE OF CODE] の内容を、Houdiniを使って追いかけていきたいと思います。
ポイントの速度と移動可能な範囲を指定。
ポイントは毎フレームで指定した速度に相当する距離移動し、範囲外に出た時に速度を反転させる。
上図では、Trail SOPとCopy SOPで軌跡を見やすくしている。
ベクトルクラスを使わないので、まとめて計算ができず、とても面倒。
PVectorクラスで速度と可動範囲を定義。
Houdini上では、速度と可動範囲をベクター型の変数で置き換えた。
ついでに、3D上で動くようにした。
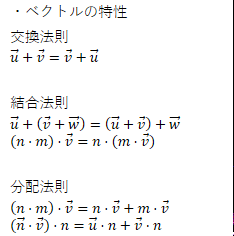
ベクトルクラスを使うと複数の値をまとめて計算できるようになりとても楽です。
※ベクトルの計算についてはあまりにも基本的すぎるので時短のため詳細は省きます
ベクトル同士の加算。
ProcessingでのPVector.add()を解説。
ベクトルクラスのメンバメソッドの解説。
Processingでは変数型にメンバメソッドが含まれる。
Houdiniでは、VEX関数を用いて同様の処理を行う。
ベクトルの長さはピタゴラスの定理で求める。
ProcessingでのPVector.mag()を解説。
ベクトルを単位ベクトルにする。
ProcessingでのPVector.normalize()を解説。
速度は位置に影響を与える。
Moverクラスを定義する。
※ここでは、Houdini標準アトリビュートの@vや@forceなどを使わず、独自のアトリビュートを用いて、最初から自前で計算します。ただし、@Pは計算結果を代入するために使います。
正しいかわからないけど、Houdinide オブジェクトをクラスととらえた時、そのオブジェクトの動作の核心は内部に含まれるSolver SOPのように見える。
Houdiniオブジェクトのコンストラクタ処理の内容は、Solver SOPの上流にあるすべての要素と言えそう。
コンストラクタの呼び出し(SolverSOPの上流にある処理)は、Solver SOPのStart Frameによって指定された時間に一度だけ行われ、キャッシュされて初期化される。
Houdiniオブジェクトが行う毎フレームの動作は、Solver SOPの中で定義する。
ある意味、Solver SOPは毎フレーム実行される関数であると考えて良いと思う。
今回作ったSolver SOP内では、現在のポイントの位置に加える変位を計算し、毎フレーム変異させる処理を行う。
加速度は速度に変化を与える。
現実的に、速度が無限に高まることはないので、一定の速度を超えないように@velocityを抑制し、速度制限する。
下記のような感じ。
f@velocityLength = length(@velocity);
if( f@maxVelocity < f@velocityLength )
{
vector normalVelocity = normalize(v@velocity);
v@velocity = normalVelocity * f@maxVelocity;
}
@P += v@velocity;
通常のプログラミングにおけるstaticメソッドに関する解説。
Houdiniオブジェクトはクラスっぽいけどクラスそのものではないので、再現できないとおもわれる。
とりあえずここは飛ばします。
加速度のターゲットと各Moverオブジェクトの距離に応じて加速度が変化するように設定。
結果、記事冒頭のムービーのように、なんとなく魚群風に見える映像が出来上がった。
長い間、仕事ではパイプライン系ツールを書くことが多くなり、幾何学や物理などの数学とはだいぶ疎遠になってしまいました。
最近になって、やっとHoudiniを業務で使用させてもらえる環境が与えられたこともあり、これも良い機会ということで、これからしばらくの間、数学の勉強や復習とリハビリを兼ね、Processingの名著 [NATURE OF CODE] の内容を、Houdiniを使って追いかけていきたいと思います。
オブジェクトが累積的にランダムな方向に動く動作。
・ランダム・ウォーカークラスを定義
Houdiniでカスタムノードを定義することはクラスを定義することと言えそう。
ただし、現時点では継承等の仕組みがあるか不明なので、あくまでもクラスもどきの定義と解釈しています。
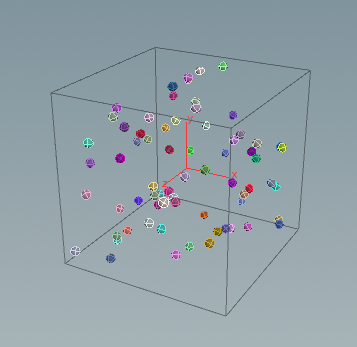
ここでは、まずSubnetをクラスとしてとらえつつ、その内部に、ランダムウォークする点群を複数含むオブジェクトを定義する。
・擬似ランダム値
一般的に、コンピュータ上で乱数を生成するランダム関数は実際には周期性があるので擬似的なランダム関数と言える。
ただし、周期が非常に長いため、実質的に真の乱数計算関数と言って差し支えない。
HoudiniでVEX関数のrandom()を使った場合、特定の値が出現する確率はほぼ一定。
具体例として、4種類の値を生成するランダム関数があるなら、それぞれの値が出現する確率はほぼ均等で約25%になる。
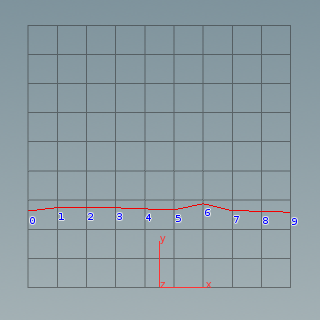
random()から出力される0~1のfloat値を0~9のint値にマッピング。
乱数を1200回発生させ、マッピング後の整数値に対応するIDを持つポイントをその都度+Y方向に移動した結果、多少のばらつきはあるものの、ほぼ均等な値が生成されていることがわかる。
このように、起こりうる結果がほぼ均等に現れる確率の分布を、一様分布と呼ぶ。
他の例としては下記のようなものもある。
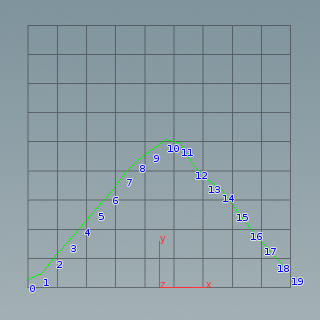
一様分布の項で作成したランダム関数を2つ足しあわせ、値が出現する回数を計測してみる。
結果、グラフは中央値が高く、山なりになるのがわかる。
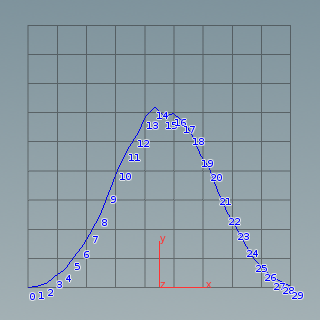
今度は、3つのランダム関数を使って同様の計算をしてみる。
より顕著に、山なりになる。
サイコロを3個振る場合を考えてみると理由は簡単。
合計値が最小の3または最大の18になるのは1または6のゾロ目の時のみで非常に確率が低いのに対し、合計値が中央付近の10になるケースはより多くの組み合わせが考えられる。
乱数を元に、予め用意された動作を選択する際、結果に偏りを持たせるには。
<<擬似コード>> results = [1,2,3,4,5] → [1,1,1,2,3,3,4,5,5,5]
<<擬似コード>>
if random < 0.1:
return 10
elif random < 0.2:
return 20
else:
return 30
ランダムな要素が平均値付近に集中する確率分布を正規分布やガウス分布(Gaussian)、ラプラス分布(Laplacian)などと呼ぶ。
[参考サイト] NtRand – 正規分布
http://www.ntrand.com/jp/normal-distribution-single/
例として、無作為に選んだ人々の身長の分布を考える。
百歩譲っていくら確率が0ではないと言っても、身長0.1cmの人や身長10mの人はそうそういない。
平均慎重と言われている165cm付近が最も多くなるはず。
確率の平均[μ]と標準偏差[σ]により求められる、確率分布を表すグラフ。
HoudiniにおけるVEX関数のrandom()は、0~1の範囲で一様分布の乱数を発生させる事ができる。(その他にも、3Dノイズなども出力できる)
HoudiniにおけるVEX関数のnoise()はシンプルなパーリンノイズ。
正規分布をもとに乱数を発生させる。
ループ中で新たなポイントを作成しながら乱数を発生させ、@P.xに与えていくと、各ポイントは下図のように配置されていく。
図では色が薄く見づらいが、μ=0.5、σ=1の正規分布で乱数が生成され、x=0.5の付近でより高密度にポイントが作成されていることがわかる。
※1マス=0.25
## 擬似コード
incident = random(1)
if incident < 0.1:
randValue = random(-100,100)
else:
randValue = random(-1,1)
上の例では、incidentが0.1以下(10%)の確率でレンジの大きな乱数を生成している。
def montecarlo():
while 1:
r1 = random(0,1)
r2 = random(0,1)
if r1 <= r2:
return r2
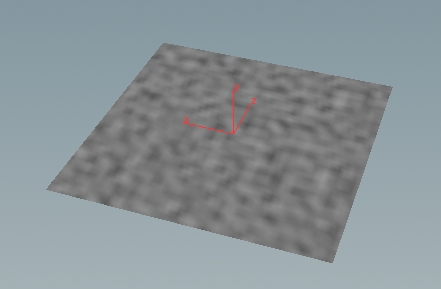
有機的なものの表現には、ランダム値の中にも連続性が必要になる。
その場合、ランダムかつ連続的に変化する値を出力するnoise関数を使用するとよい。
HoudiniのVEX関数 noise()は、正規分布に近い連続的でランダムな値を返すパーリンノイズ関数で、整数を与えるとすべて同じ値(0.5)を返すようになっているので、引数は極力整数値にしないように注意する。
## noise()の使用例 f@dx = fit(noise(@Time+(@ptnum*0.339)+offset),0,1,-1,1);
Mayaの場合、noise()関数は周期性を感じさせない上に、出力される値も-1~1の範囲にきっちり収まるようになっている。
そのため、単純なフレーム番号を引数にするだけで延々と連続的なランダム値を生成し続け、その値を係数にして角度の変化などを計算する際、変化のレンジにただ掛け合わせるだけでよかった。
Houdiniのnoise()関数は、整数値を与えると全く同じ値が返る上に、結果が正規分布で得られるため、Mayaのnoise()関数と全く同じ感覚では使えない。
正規分布のおかげで結果を有機的にしやすい反面、変化幅の上下限をきっちり決めづらくとても気持ち悪く感じてしまう。(例えば毎フレーム何らかのオブジェクトの角度を変化させたい時、0~180度の角度範囲を上下限とし、-1~1の範囲の係数をかけて使いたい場合など)
もしかしてMayaのnoise()に近い関数があるんだろうか?(誰かご存知でしたら教えて下さい)
・パーリンノイズによるランダムウォーク
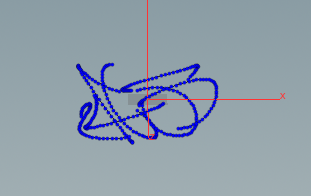
パーリンノイズは1~4次元の値を引数に取り、同様に1~4次元の値を出力できる。
・@Cdにnoise(x,y)の結果を適用
・@P.yにもnoise(x,y)の結果を適用
※わかりやすくするため、頂点数とカラーのレンジを調整済み
この章では、自然現象をシミュレートする際に必要となる確率や乱数を学習した。
ランダム性を取り入れることで、より自然で複雑な要素を作成できる。
だがしかし、同じアルゴリズムにばかり頼ってしまうと結果的にパターンが透けて見えてしまい、結果が退屈な仕上がりになる場合もあるので、より多くの手法を身につけ、引き出しを増やし、様々なニーズに臨機応変に対応できるスキルを磨くことが大事。
NtRand – 確率分布Navi
http://www.ntrand.com/jp/gallary-of-distributions/
何か間違いなどあればツッコミいただけると喜びます。
よろしくお願いします。
また、絵的に少しどうかしている映像をアップしました。
今回は、エージェントをただラグドール化するのではなく、Stateの遷移を引き起こすボリュームにエージェントが含まれたらラグドール化し、そのボリュームから発せられる力を受けて、任意の方向に飛ばされるように設定するようにしてみました。
動画では非表示にしていますが、足元からエネルギー球がせり上がり、それに触れたUnityちゃんエージェントが吹き飛ばされているように設定してあります。
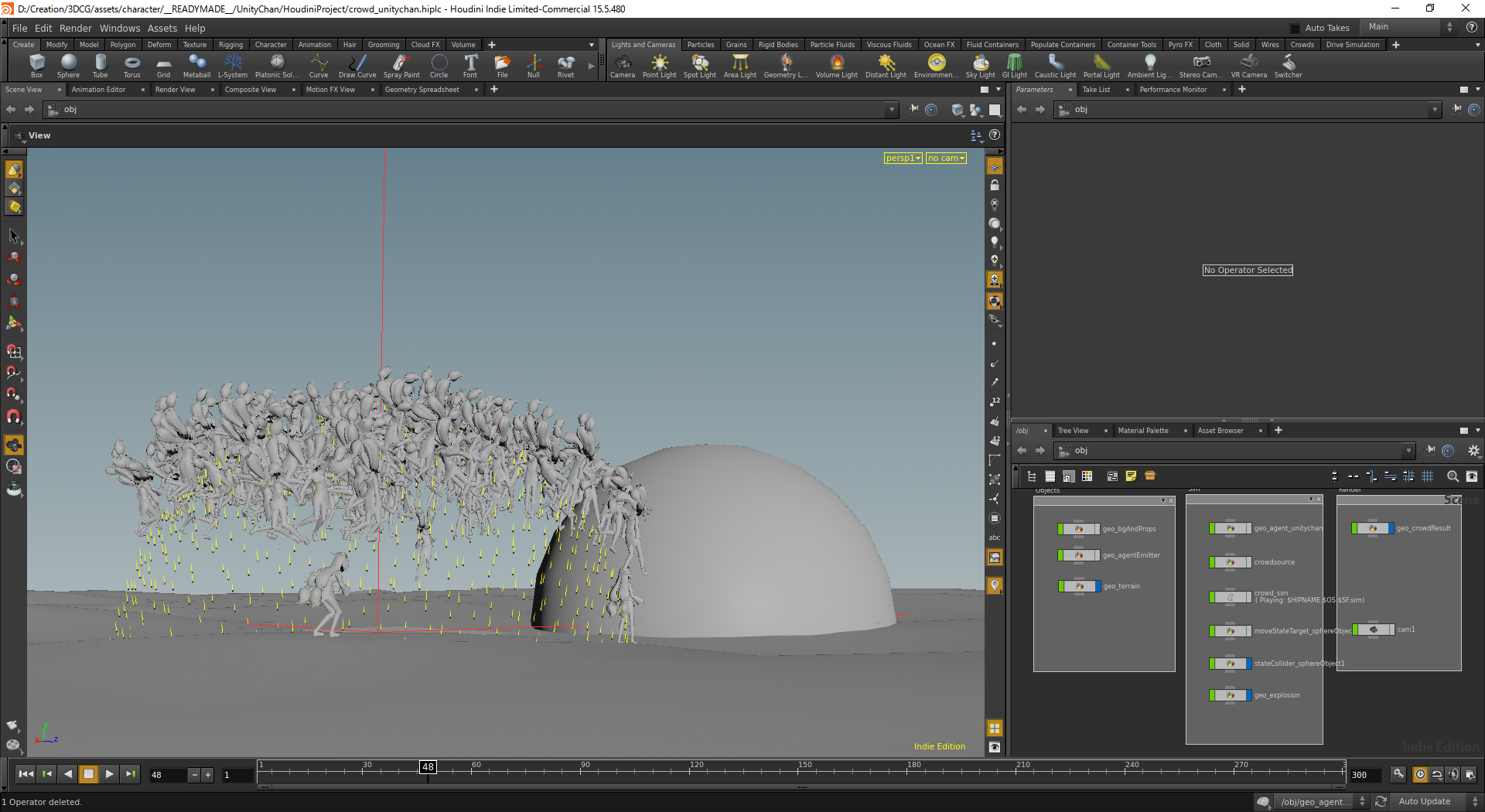
左に見えている点群がイベントボリューム兼カスタム外力発生器です。
各点から出ている黄色のラインは力の方向です。
この点群を大型キャラの四肢にアタッチするなどしておけば、自然と、大型キャラに暴れるモーションを付けるだけで、群がる群衆をを次々となぎ倒していくような絵が作れますね。
(例)
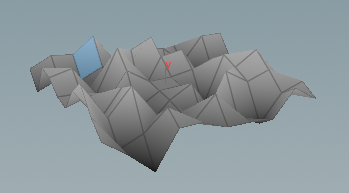
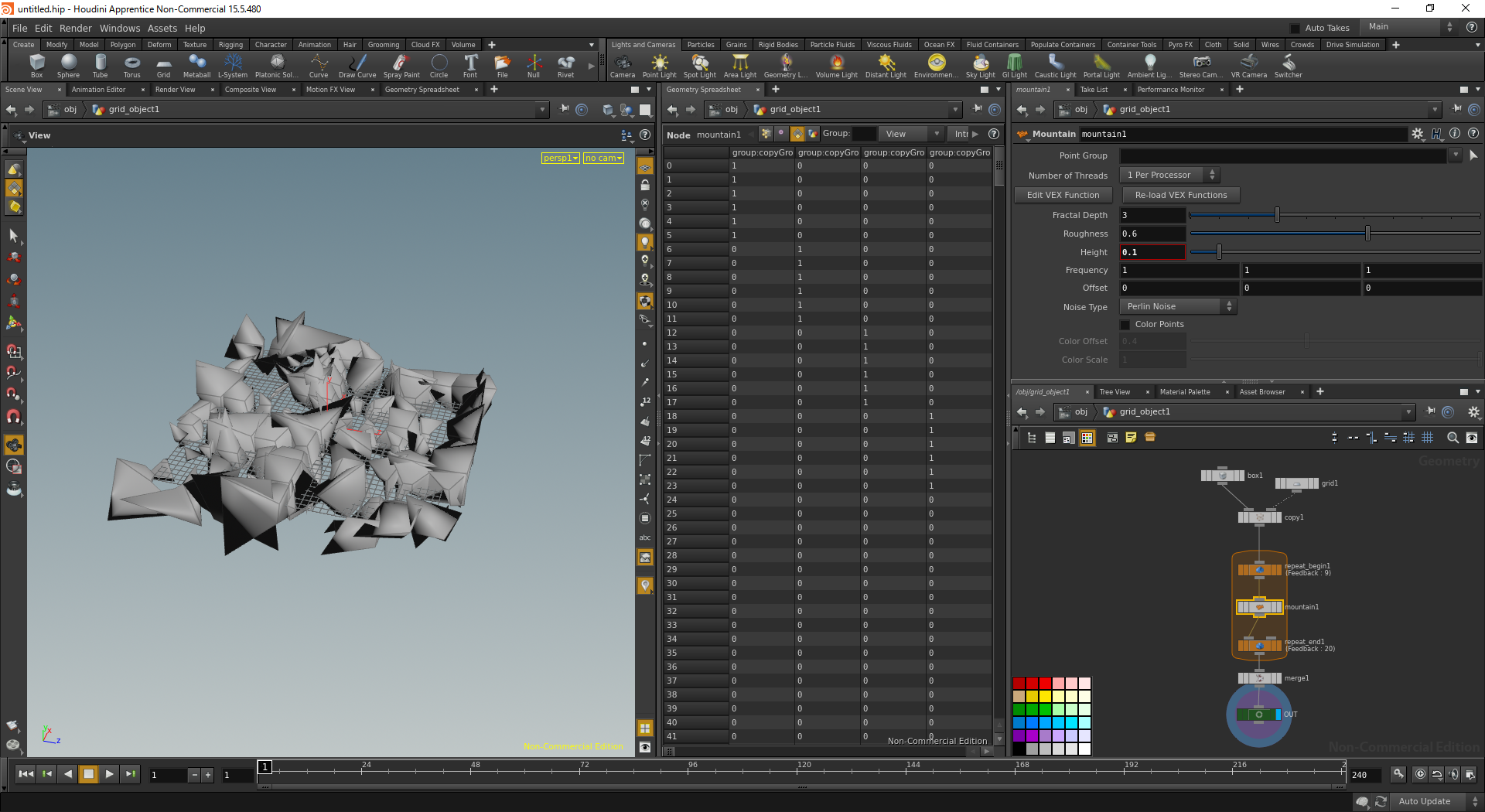
Copy SOPで複製されたジオメトリ全体を対象に、Mountain SOPの処理を累積的に10回行う。
(例)
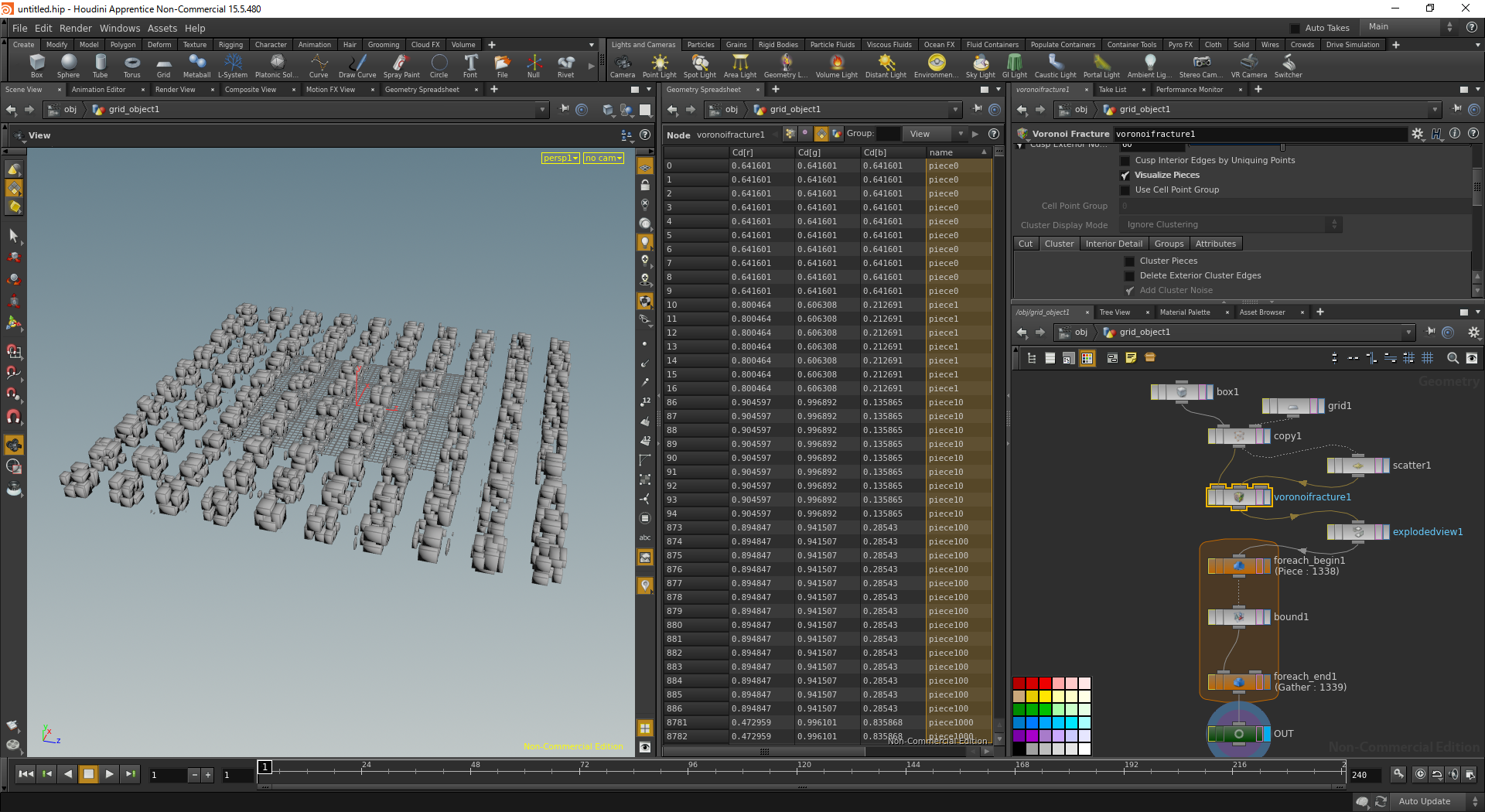
複数のグループを複数含むジオメトリデータから、特定のルールにマッチするグループを1つずつ個別に取得し、個別にバウンディングボックスに置き換える。
(例)
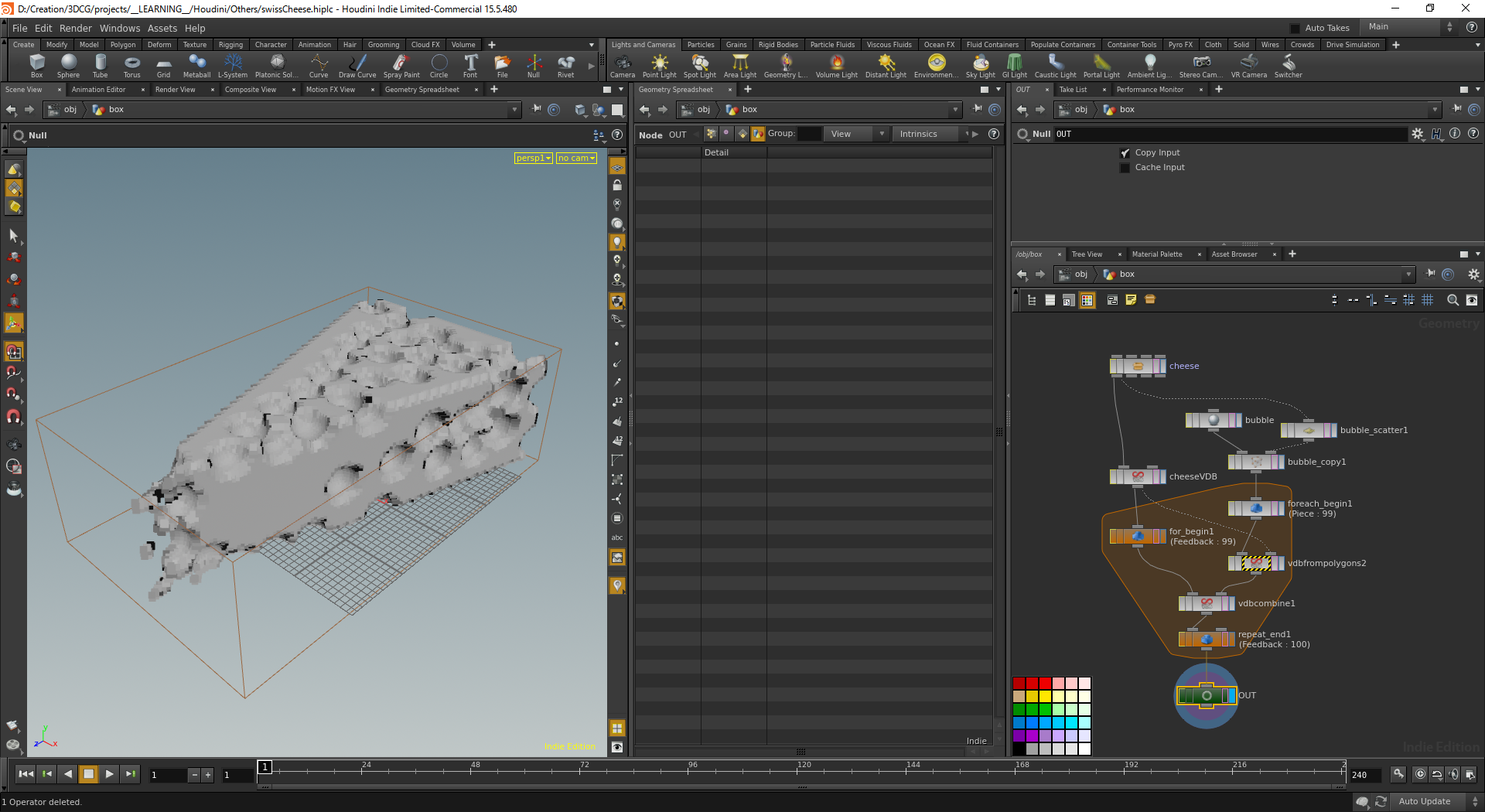
穴あきチーズ
複数の気泡オブジェクトを入力し、気泡オブジェクトのピースごとに、チーズの本体に累積的に繰り返し削り取る。
Tab -> For loop
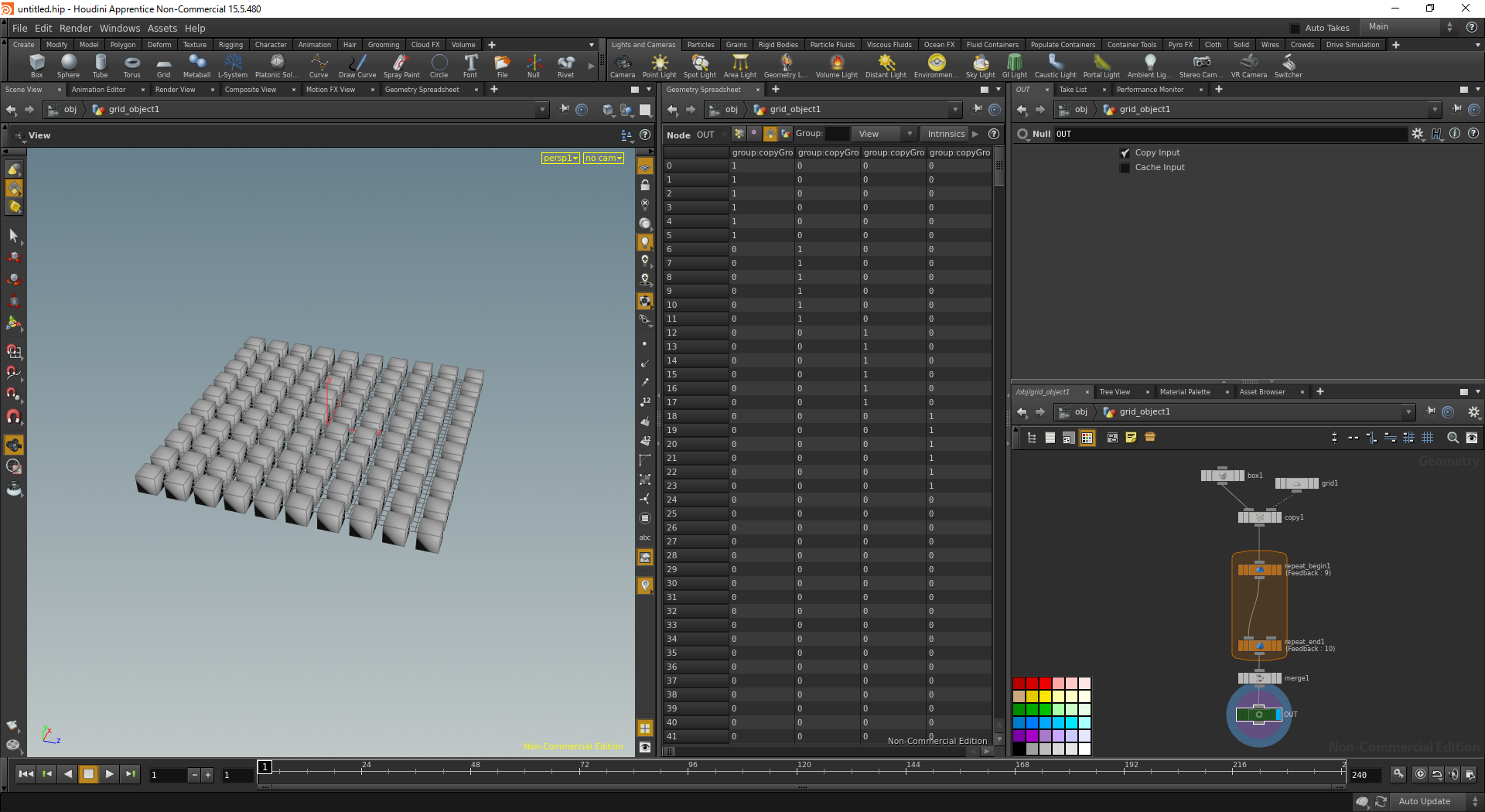
オレンジ色に囲まれた部分がforループのブロック
MountainSOPを挿入しHeightを0.1に変更
Block EndのIterationパラメータを変化させると、各ボックスが累積的に変形することが確認できる。
※同じ設定のMountainSOPで同一の処理を累積的に10回繰り返すことと同じなので、CopySOPの下流にMountainSOPを10個作って直列で繋げても同じ結果が得られます。
Tab -> For-Each loop
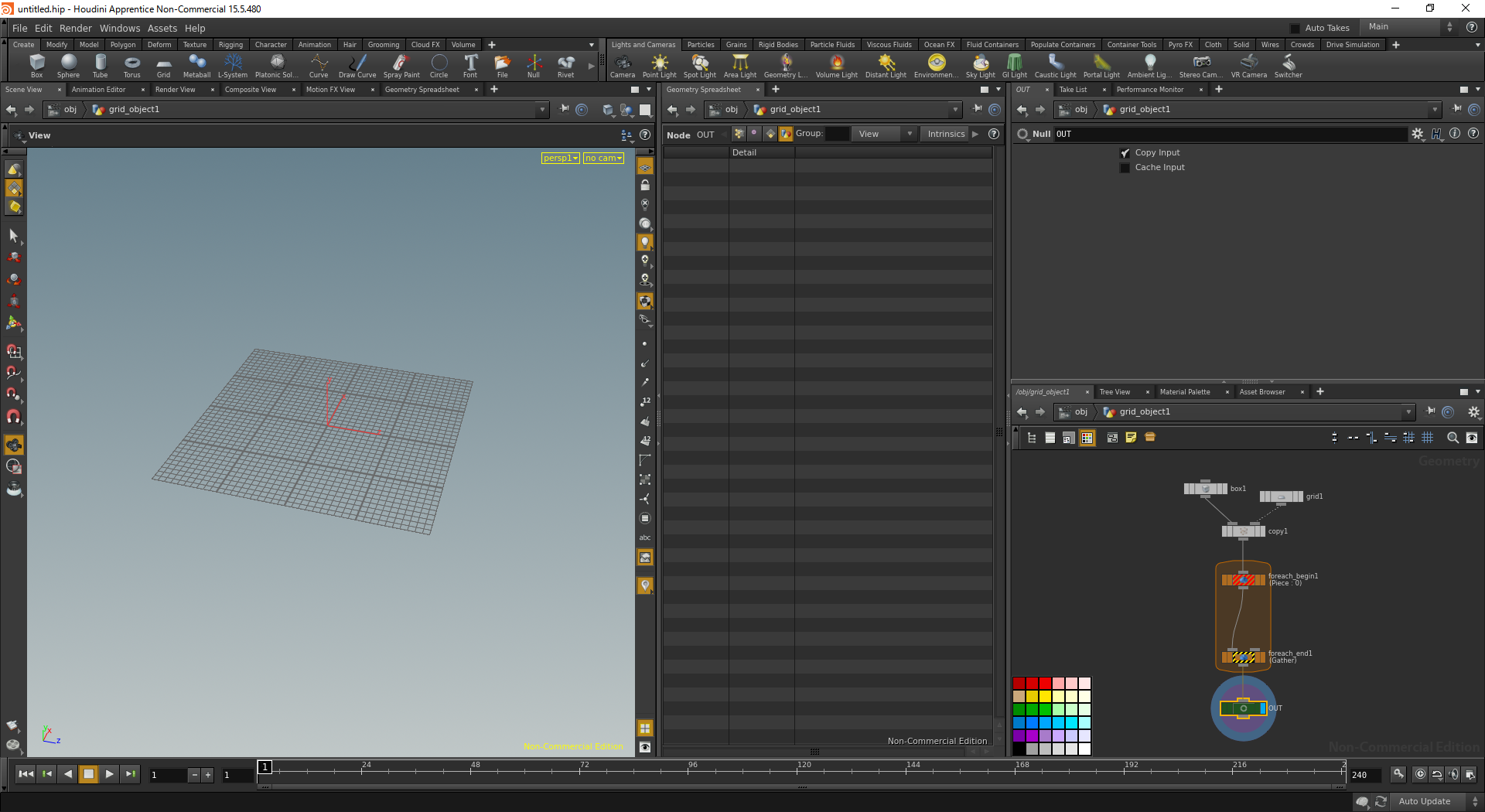
ピース単位の処理。
ピースは、ピースを表現するアトリビュート(通例では@name)の値の同一性により表現される。
For-Each loopを作成した直後は、上流に@pieceや@nameがないためにエラーが出る場合がある。このような場合は、自分でアトリビュートを作成する。
Voronoi Fracture SOPなど、自動的に@nameを作るSOPもある。
Voronoi Fracture SOPのデフォルト設定では、破片ごとにPrimitiveクラスの@nameを作成し、piece+番号の命名規則で各Primitiveが所属するピースを表現する。
@name以外のアトリビュートを使用してピースを表現したい場合は、Block End SOPのPiece Attributeを変更し、任意のアトリビュート名を指定する。
CopySOPで複製したBoxをVoronoi Fracture SOPで分割
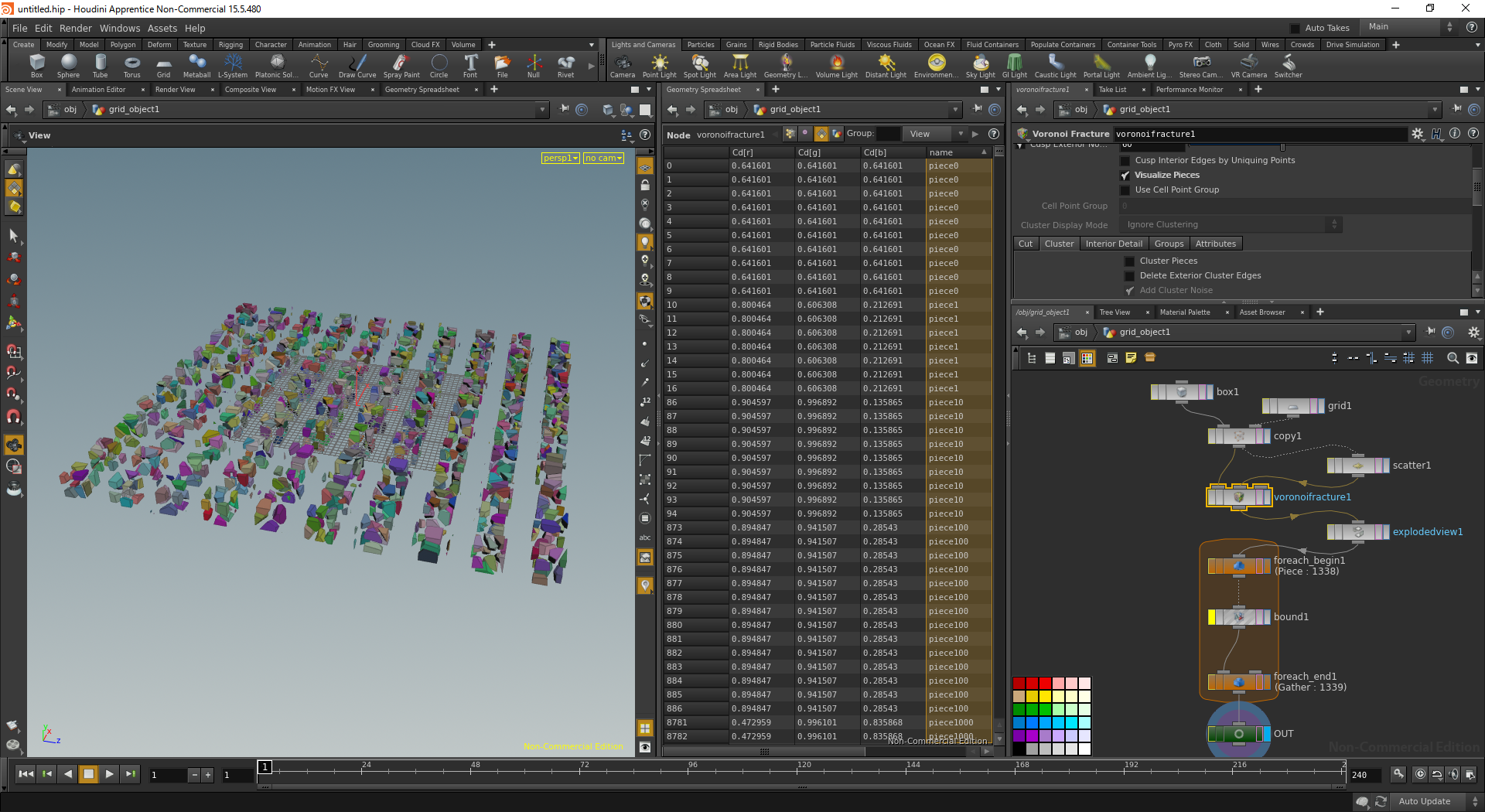
For-Each loopにより、各破片のピースをバウンディングボックスに置き換え
このループの終点を示すBlock End SOPへのパス
Metaデータを持つBlock Begin SOPを作成する。
この実態は、ModeがFetch Metadataに設定され、Block Pathが現在のループの終点にセットされているBlock Begin SOP。
ループ回数の指定
一般的なforループで使用する変数
・Python風に書くならこんな感じ
for i in range(startValue , iterations , increment):
あるジオメトリに対し、別のジオメトリを使って複数回の処理を累積的に行う事ができる。
Block BeginのヘルプにあるSwiss Cheeseサンプルでは、チーズ本体のVDBオブジェクトを一つと、気泡のVDBオブジェクトを複数入力し、チーズ本体オブジェクトを気泡オブジェクトごとに削り取る処理を行う。
ループ内でdetailエクスプレッション関数を使う。
Block End SOP の Stop Condition を1にセットすると強制的にループを終了できる。
Block End SOP の Max Iterationsパラメータで最大ループ数を設定できる。
数回のループだけである程度結果が判断できる場合は、このパラメータを有効化することでループ処理を制限し、素早く調整が行えるので便利。
Block End SOP の Single Passパラメータでピース番号を指定して、ピースごとの処理結果を確認できる。
グループパラメータを使ってピースを作成したい場合は、Name SOPを使用して@nameを作成し、グループ名をセットしておく。
何か間違いがあれば突っ込んでいただけると嬉しいです
先日から続けているHoudiniの群衆シミュレーション勉強。
今回は、状態遷移とラグドールの勉強。
正直、かなりどうかしている映像になってしまったけど、今日の勉強の成果としてアップ。
使用したエージェントの状態は、待機5種+歩行+ジャンプ+ラグドールによるシミュレーションと言った感じ。歩き出しがぎこちないのは、待機モーションと歩行モーションのポーズ差が大きすぎるからで、こういう場合は中間モーションを作ったほうが良さそう(特に回し蹴りモーションからの歩き出し)
群衆シミュレーションだと、手前のキャラは手付けで動かし、群衆は大写しになりにくい上に、もっとエージェントの密度が高い場合が多いと思うので、もう少しだけエージェントの状態遷移がスムースになればかなり見られる絵が作れると思ったりする。
Houdini 15.5 から搭載された Agent Terrain Adaptation も試してみたい。
最近Houdini のCrowd Systemを勉強し始めた。

手頃なテストデータがなかったので、今回はUnityちゃんのfbxデータをUnity経由で引っこ抜いて使用してみる。
今日はとりあえず、モーションを読み込むところで終了。
群衆と関係なく、Fetch CHOPでFBXモーションを適用する方法がわかった。
Fetch CHOPで
1 モーションデータの取得先と取得チャンネルを指定。
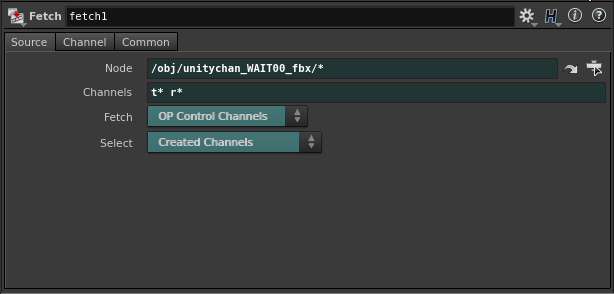
2 モーションデータの適用先を指定。

3 これでFetchを有効化
これで、指定したモーションfbxがまとめられたsubnet内のモーションが再生される。
今年の1月末くらいに作り始めたのはいいものの、公私ともに忙しく、なかなか手がつけられなかったツール「MYAM_QuickSelector」が、このGWでだいぶ形になってきたので、途中経過を駆け足で記事にしてみます。
Qtは目的に到達するまでの手続きが多く面倒な部分も多いですが、慣れるて来るととても楽しいです。もうMaya標準のGUIライブラリは触れません。
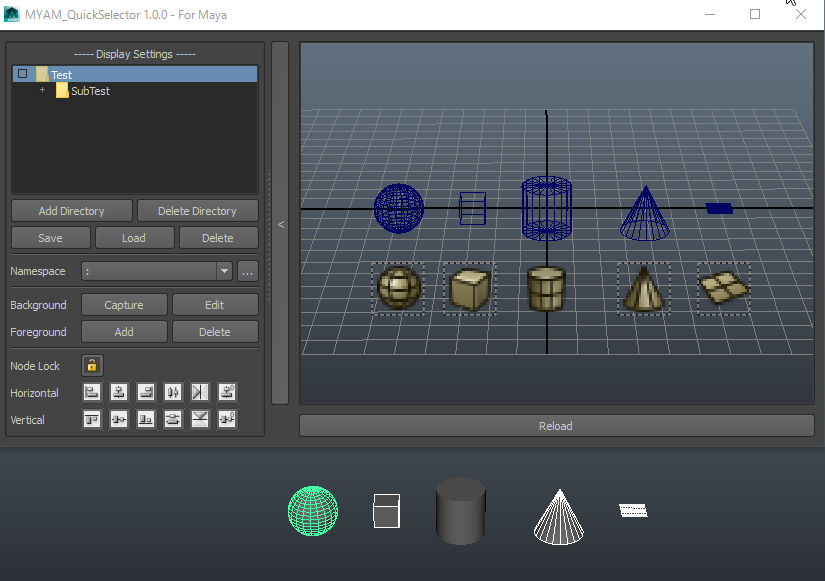
好きな画像をツール上からキャプチャし、背景に置いた状態で好きなノードに対応するボタンを配置し、いつでも簡単に選択できるようになります。
選択できるアイテムはいわゆるDAGオブジェクトだけでなく、マテリアルなどのDGノードにも対応します。
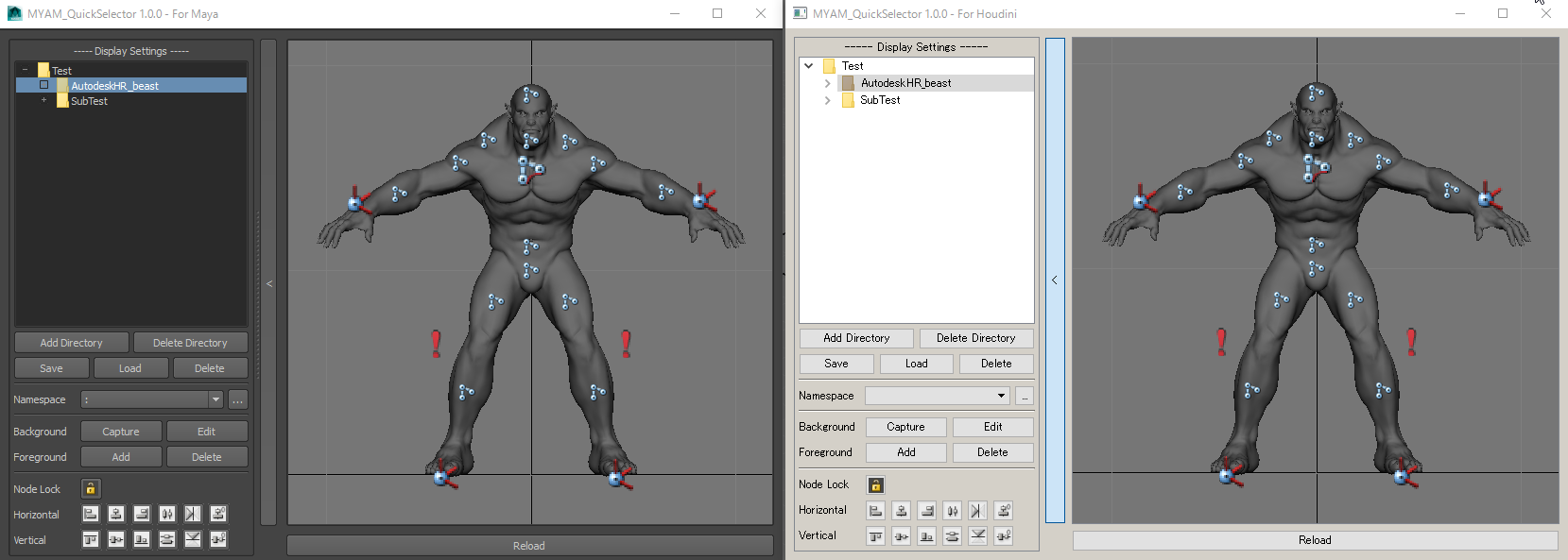
Maya上でもHoudini上でも全く同様に動作します。(現在はMayaのみ対応ですが)
その他にも、最小限の拡張でPySideが使えるすべてのDCCツールに対応可能です。
DCCツールを変えた時にも、操作法が統一されていると覚え直す必要もなく楽です。
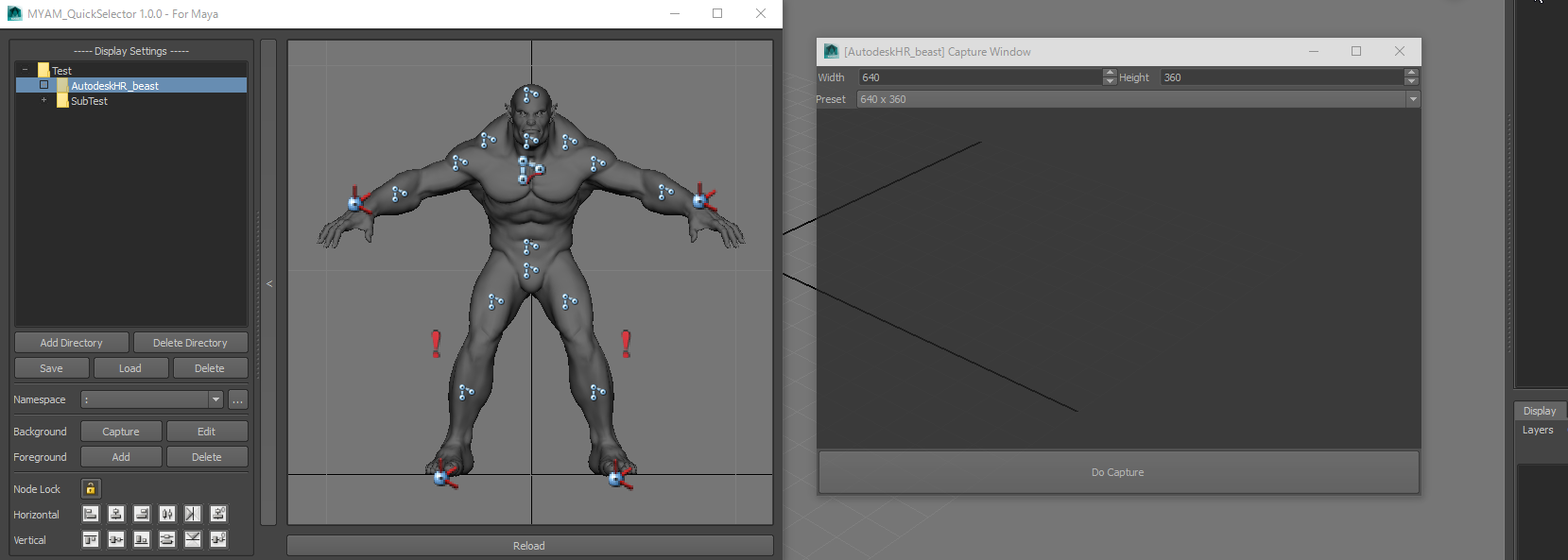
Bandicamのようにウインドウを使ってキャプチャ範囲を指定して、背景画像として取り込むことができます。
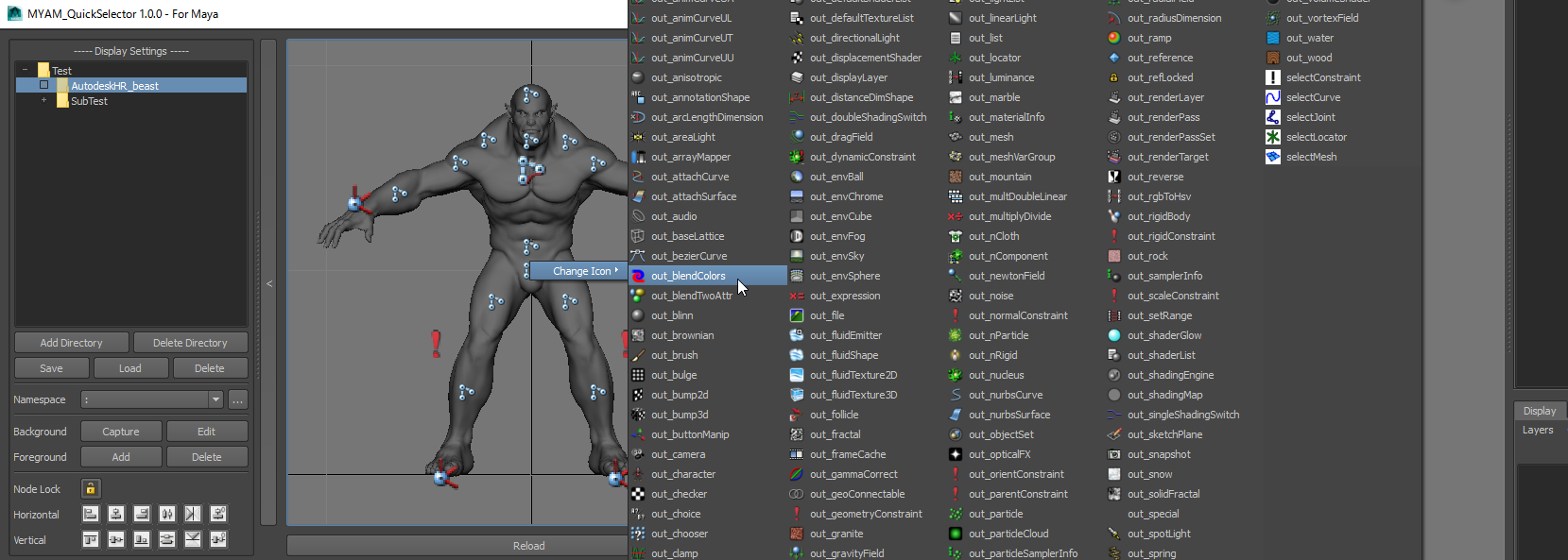
ジョイントやコントロールリグなど、タイプごとに任意の画像をアイコンとして設定できます。
また、各アイコンのサイズも自由に変更できるため、よく使うコントローラを目立たせておくなど、視認性を高められます。
アイコン置き場フォルダに任意の画像を格納しておけば、自動的にツール内で使用できるようになります。
その他にも、配置したボタンの整列なども手軽に行なえます。
もう少し洗練して、早くリリースしたいなあ。
昔とある仕事場で作成した MYAM_quickSelector2 の後継ツールをQtで作り始めました。
前述のツールの機能に加え、足したい機能は大体以下の様な感じです
・オブジェクトアイコンに任意の画像が使用できる
・オブジェクトアイコンのサイズや形状を自由に変更できる
・Maya/MotionBuilder/Houdiniあたりで共通して使えるようにする
・選択オブジェクトのグループ登録/簡単選択
まだほとんど仮組みの状態ですが、完成したらCreative Crashあたりで公開すると思います。
簡易的なIBL用のHDRIを作成するため、素材になる天球マップ画像をRicoh THETA SをiPhoneで遠隔操作して手軽にオートブラケット撮影できるようにしてみました。
撮影方法は、ISOを固定しEVを変化させて行う露出ブラケット撮影になります。
今の所、使用する撮影モードではシャッタースピードを同時に操作できなそうなので、自動設定にしてあります。
THETA SはRAWデータでの撮影ができず、また撮影時に厳密なホワイトバランス設定などもできないので精度は落ちますが、簡易的に使用するにはそこそこ使えるHDRIが得られると思います。
iOSデバイスに限らず、THETA Sとネットワーク接続できるデバイスで、なおかつ標準的なPythonを実行できるなら同じように使用できるはずです。
というわけで、需要がありそうなのでソースコードを公開します。
時間の関係で良い作例の用意ができていませんが、そのうち貼りたいと思います。
1:デバイスとTHETA Sをネットワーク接続接続します
2:下記スクリプトをデバイス内のPython実行環境で実行します
当方は、iPhone6S+上で iOS用のPython 2.7 というアプリを使用しています。
3:撮影されたJPEG画像をHDR ShopやLuminance HDRなどを使ってHDRIにします
#******************************************************************************
'''
Tool Name : MYAM_ThetaAutoBracket.py
Description :
Copyright : (c) Yamabe Michiyoshi
Author Name : Yamabe Michiyoshi
'''
#******************************************************************************
import httplib
import json
import time
#
class ThetaSettings(object):
# Full
# evs = [-2.0, -1.7, -1.3, -1.0, -0.7, -0.3, 0.0, 0.3, 0.7, 1.0, 1.3, 1.7, 2.0]
# Simple
evs = [-2.0, -1.0, 0.0, 1.0, 2.0]
exposureProgram = 9
iso = 100
whiteBalance = "auto"
_shutterVolume = 50
shutterInterval = 1
#
class Theta(object):
def __init__(self):
self.headers = {"Content-Type":"application/json", "Accept":"application/json"}
# Auto Bracket
def takePicturesByAutoBracket(self):
print "--------------------"
print "START AUTO BRACKET"
print "--------------------"
# Connect to THETA
connection = self.connect()
# Start Session
self.startSession(connection)
# Get Session ID
responseData = self.getResponseData(connection)
sessionId = responseData["results"]["sessionId"]
# Take Pictures
for i in range(len(ThetaSettings.evs)):
# Set options
ev = ThetaSettings.evs[i]
print "----------"
print "%i / %i" % ((i + 1), len(ThetaSettings.evs))
print "iso : %i" % ThetaSettings.iso
print "EV : %d" % ev
picOpt = {"exposureProgram":ThetaSettings.exposureProgram,
"exposureCompensation":ev,
"iso":ThetaSettings.iso,
"whiteBalance":ThetaSettings.whiteBalance,
"_shutterVolume":ThetaSettings._shutterVolume}
self.setOptions(connection, sessionId, optionParams=picOpt)
responseData = self.getResponseData(connection)
# Take Pictute
self.takePicture(connection, sessionId)
# Wait to finish idle time
self.waitFinishCurrentCommand(connection, interval=ThetaSettings.shutterInterval)
# Close Session
self.closeSession(connection, sessionId)
# Disconnect from THETA
self.disconnect(connection)
print "--------------------"
print "FINISH AUTO BRACKET"
print "--------------------"
# HTTPConnection Control
def connect(self):
connection = httplib.HTTPConnection("192.168.1.1",80)
return connection
def disconnect(self,connection):
connection.close()
# Common Commands
def postExecCommand(self,connection,params):
connection.request("POST", "/osc/commands/execute", params, self.headers)
def postStatusCommand(self, connection, commandId):
params = json.dumps({ "id":commandId })
connection.request("POST", "/osc/commands/status", params, self.headers)
def waitFinishCurrentCommand(self, connection, interval=1):
responseData = self.getResponseData(connection)
commandId = responseData["id"]
while True:
self.postStatusCommand(connection, commandId)
responseData = self.getResponseData(connection)
commandStatus = responseData["state"]
if "inProgress" == commandStatus:
print "commandId [%s] : Processing..." % ( commandId )
time.sleep(interval)
else:
print "commandId [%s] : Finish!" % ( commandId )
break
# Command Control
def startSession(self, connection):
params = json.dumps({ "name":"camera.startSession", "parameters":{} })
self.postExecCommand(connection, params)
def updateSession(self,connection,sessionId):
params = json.dumps({ "name":"camera.updateSession", "parameters":{"sessionId":sessionId} })
self.postExecCommand(connection, params)
def closeSession(self, connection, sessionId):
params = json.dumps({ "name":"camera.closeSession", "parameters":{"sessionId":sessionId} })
self.postExecCommand(connection, params)
def takePicture(self,connection , sessionId):
params = json.dumps({ "name":"camera.takePicture", "parameters":{"sessionId":sessionId} })
self.postExecCommand(connection, params)
def setOptions(self, connection, sessionId, optionParams):
params = { "name":"camera.setOptions" , "parameters":{"sessionId":sessionId, "options":{} } }
for key , value in optionParams.items():
params["parameters"]["options"][key] = value
jsonParams = json.dumps(params)
self.postExecCommand(connection, jsonParams )
def getOptions(self, connection, sessionId, optionNames):
params = { "name":"camera.setOptions" , "parameters":{"sessionId":sessionId, "optionNames":{} } }
for key , value in optionParams.items():
params["parameters"]["options"][key] = value
jsonParams = json.dumps(params)
self.postExecCommand(connection, jsonParams )
self.postExecCommand(connection, params)
# Support Functions
def getResponseString(self,connection):
response = connection.getresponse()
responseString = response.read()
return responseString
def getResponseData(self,connection):
responseString = self.getResponseString(connection)
responseData = self.convertJSONToPythonData(responseString)
return responseData
def convertJSONToPythonData(self,jsonDataString):
jsonDecoder = json.JSONDecoder()
pythonData = jsonDecoder.decode(jsonDataString)
return pythonData
def convertPythonDataToJSON(self,pythonData):
jsonEncoder = json.JSONEncoder()
jsonDataString = jsonEncoder.encode(pythonData)
return jsonDataString
def main():
theta = Theta()
theta.takePicturesByAutoBracket()
if __name__ == "__main__":
main()
設定の変更を行うにはコードを直接書き換える必要があります。
撮影枚数は、ThetaSettingsの evs で指定されているEV値の数で指定されます。
撮影ごとにリスト内のEV値がそれぞれ使用されます。
class ThetaSettings(object):
# Full
# evs = [-2.0, -1.7, -1.3, -1.0, -0.7, -0.3, 0.0, 0.3, 0.7, 1.0, 1.3, 1.7, 2.0]
# Simple
evs = [-2.0, -1.0, 0.0, 1.0, 2.0]
指定できるEV値は、上記の Full で指定されている13個の値になります。
THETA Sは一枚撮影するごとに内部処理に約8秒ほどかかるようなので、撮影枚数が多くなると時間がかかります。
必要に応じ、不要な値を削除するなどして調整してください。
exposureProgram = 9
iso = 100
whiteBalance = "auto"
_shutterVolume = 50
現在は、上記を指定できます。
必要に応じ、RICOH THETA API v2 Referenceを参照して値を設定してください。
といいつつおそらく上記の中では iso と _shutterVolume くらいしかいじらないと思います。
・_shutterVolume
0−100の間で指定します。0が無音です。
・iso
以下の値が使えます
100, 125, 160, 200, 250, 320, 400, 500, 640, 800, 1000, 1250, 1600