今回は、カスタムノードにカスタムパラメータを追加してみます
VerbとProtoヘッダファイル
最近のHDKでは、SOPノード作成にVerbという仕組みを使うことが多いようです。
Verbというのは、かなりざっくりいうと、SOPの振る舞いを定義する際、ジオメトリへの処理と、それ以外のパラメータ操作などの処理を分離する仕組みです。
Verbを利用してSOPを作成する際、これまで何度か言及していた、「Protoヘッダファイル」をビルド手順の中で生成し利用することになります。
Protoヘッダファイルの主な役割
Protoヘッダファイルには、ジオメトリ処理以外の実装が自動的に記述されます。
※これは現時点での理解なので間違っているかもしれませんが、この仕組みにより、開発者は面倒なパラメータとジオメトリ処理をつなぐ実装を省略し、主にジオメトリ操作に関する処理に注力すれば良くなります。
主なProtoヘッダファイルの役割は以下のようなものになります。
- PRM_Templateを生成する
- パラメータの操作を簡単化する関数群を自動生成する
Protoヘッダファイルの作り方
Protoヘッダファイルは何もしなくても勝手に作成されるわけではなく、ソースコードの中にそのノードがどのようなパラメータを持っているかを示す「Dialog Script」を記述、または「*.ds形式のファイル」として用意して、PRM_TemplateBuilderに与える必要があります。
このDialog Scriptは、ソースコード中で *theDsFile に記述します。
static const char *theDsFile = R"THEDSFILE( ・・・ )THEDSFILE";
//SOP_Starの例
static const char *theDsFile = R"THEDSFILE(
{
name parameters
parm {
name "divs" // Internal parameter name
label "Divisions" // Descriptive parameter name for user interface
type integer
default { "5" } // Default for this parameter on new nodes
range { 2! 50 } // The value is prevented from going below 2 at all.
// The UI slider goes up to 50, but the value can go higher.
export all // This makes the parameter show up in the toolbox
// above the viewport when it's in the node's state.
}
parm {
name "rad"
label "Radius"
type vector2
size 2 // 2 components in a vector2
default { "1" "0.3" } // Outside and inside radius defaults
}
parm {
name "nradius"
label "Allow Negative Radius"
type toggle
default { "0" }
}
parm {
name "t"
label "Center"
type vector
size 3 // 3 components in a vector
default { "0" "0" "0" }
}
parm {
name "orient"
label "Orientation"
type ordinal
default { "0" } // Default to first entry in menu, "xy"
menu {
"xy" "XY Plane"
"yz" "YZ Plane"
"zx" "ZX Plane"
}
}
}
)THEDSFILE";
Dialog Scriptを生成する
頑張って調べてみましたが、この記事を執筆している時点では、Dialog Scriptに関するリファレンスマニュアルのようなものを見つけることは出来ませんでした。
そのかわり、リファレンスに頼ってフルスクラッチで書かなくとも、簡単にDialog Scriptを生成する方法があったので紹介します。
やり方は、概ね以下の手順になります。
- パラメータ定義を抽出するためHDAを作成
- HDAに、カスタムノードに持たせたいパラメータを作成
- HDAのhou.ParmTemplateGroup.asDialogScript()でDialog Scriptのコードを取得
# Dialog Scriptを出力するサンプル
hda_node = hou.node("/to/hda/node/path")
hda_type = hda_node.type()
hda_definition = hda_type.definition()
hda_parm_template_group = hda_definition.parmTemplateGroup()
hda_dialog_script = hda_parm_template_group.asDialogScript()
print(hda_dialog_script)
これにより、そのHDAに定義されたパラメータ定義が、Dialog Scriptの形式で取得できます。
その後、ソースコードの*theDsFileに、取得したコードをそのままコピペするなどして与えた後、いつも通りの手順でビルドするだけです。
テスト
以下は、HDAとして標準で用意されているColor SOPからDialog Scriptを頂いて、カスタムSOPにそのまま持たせてみたものです。
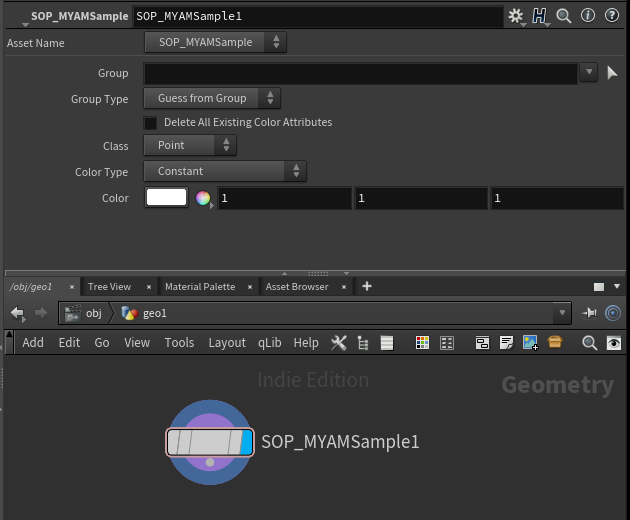
以上、カスタムSOPにカスタムパラメータを追加する方法でした。
なにか間違いや、不明な点などあれば、コメントいただけると嬉しいです。